|
|
||||||||||||||||
|
|
ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ БРОНЕОБЪЕКТОВ С ТАНКА-НОСИТЕЛЯ И. С. Крылов, Н. Н. Мареева, В. И. Галулин Вестник бронетанковой техники. 1973. № 2.
Полуавтоматические системы наведения противотанковых управляемых реактивных снарядов (ПТУРСов) обладают существенным недостатком – точность наведения снаряда на цель в значительной степени зависит от качества ручного сопровождения цели оператором. Исследования показали, что вероятность поражения цели 0,9-0,96 на дистанции 3000 м может быть обеспечена только при условии, если среднее квадратичное значение ошибок сопровождения цели не будет превышать по вертикали 0,3-0,45 м в плоскости цели, по горизонтали – 0,45-0,6 м. Реальные же ошибки ручного сопровождения на этой дистанции превышают допустимые в 2-3 раза. Поэтому указанные точности сопровождения могут быть достигнуты только при использовании автоматических систем сопровождения цели, в которых роль оператора сводится к минимуму. При разработке систем автоматического сопровождения цели необходимо учитывать следующие особенности движущейся цели.
Первый этап решения задачи заключался в исследовании спектрального и пространственного распределения лучистости танков и природных образований в широкой области спектра от 6,4 до 14 мкм. Рядом исследований установлены следующие факторы, которые следует учитывать при разработке систем автоматического сопровождения цели. 1. В видимой части спектра средний контраст между танками и природными образованиями знакопеременный в пределах +0,2-0,4. 2. Инфракрасную часть спектра можно разделить на три диапазона. В диапазоне 0,7-2,5 мкм лучистость танков и фонов, как и в видимой части спектра, определяется их отражательной способностью; контраст между танком и различными фонами отрицательный (лучистость фона выше лучистости цели), его величина не зависит от ракурса цели, а его среднее значение лежит в пределах 0,2-0,9. Диапазон 2,5-3,5 мкм характеризуется малыми уровнями энергии отраженного и собственного теплового излучения. В диапазоне 3,5-14 мкм лучистость танков и фонов определяется их собственным тепловым излучением, которое практически соответствует излучению АЧТ при той же температуре. Знак контраста положительный. Величина его зависит от ракурса цели и находится в пределах 0,1-0,6, исключая лобовую проекцию. Контраст лобовой проекции при благоприятных условиях составляет 0,01-0,03, при неблагоприятных (в холодную, дождливую погоду и т. п.) практически отсутствует. По данным исследований для пассивных оптикоэлектронных систем автоматической пеленгации, работающих по объектам БТТ, можно рекомендовать три участка: 0,7÷1,4 мкм, 3,5÷5,5 мкм и 7÷14 мкм. Из них для работы в светлое время суток следует отдать предпочтение первому участку, в котором в отличие от двух других контраст между танками различных типов и разнообразными природными образованиями не зависит от ракурса. Установлено также, что контраст между отдельными фонами может быть такой же величины, что и между танком и фоном, а отдельные участки фона могут иметь приблизительно те же угловые размеры и энергетический контраст, что и танк. В этом случае помехозащищенность координатора может быть обеспечена при условии, близком к условию максимальной помехозащищенности координатора от внешних помех, т. е. при равенстве угловых размеров поля зрения координатора и цели, когда влияние фона исключено. Поэтому в системах пеленгации объектов БТТ рационально применять модуляторы, позволяющие определять энергетический центр поля зрения. В результате сравнительного анализа координатора с подобными модуляторами [1] установлено, что наиболее приемлем для данного случая координатор с полудисковым модулятором. Такой координатор имеет относительно простую структурную схему и обеспечивает наибольшую величину полезного сигнала. В электрическом тракте такого координатора происходит линейное преобразование сигнала и шума. Возможность применения в оптическом канале телескопической системы позволяет проектировать входной зрачок на одну и ту же площадь чувствительного слоя приемника при изменении поля зрения с помощью полевой диафрагмы и тем самым исключить влияние неравномерности зонной характеристики приемника. Теоретические исследования работы анализатора с полудисковым модулятором показали, что при отношении углового размера поля зрения к видимому угловому размеру цели, не превышающему 1,4, ошибка координатора за счет неравномерности фона не превышает 20 см в плоскости цели [1]. Условие помехозащищенности выполняется на дистанциях от 500 до 3000 м с помощью четырех сменных диафрагм поля зрения, что подтверждено экспериментом. В таблице приведены размеры поля зрения, обеспечивающие надежное сопровождение танка на различных дистанциях в реальных условиях, и угловые размеры цели на этих дистанциях.
Размеры поля зрения, обеспечивающие надежное сопровождение танка
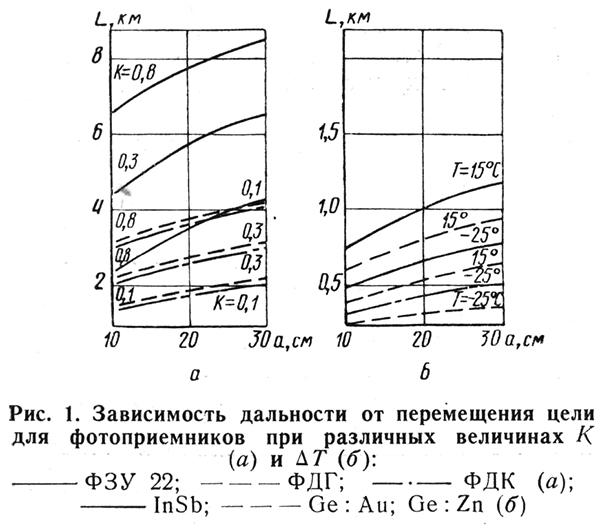
На основании сравнительной оценки пороговой дальности координатора в рекомендованных участках спектра и при использовании различных фотоприемников (ФЭУ с кислородно-серебряно-цезиевым катодом, германиевого и кремниевого фотодиодов, фотосопротивлений InSb, Ge:Au, Ge:Zn установлено, что наибольшую дальность действия может обеспечить координатор, работающий в области спектра 0,7-1,4 мкм с ФЭУ в качестве приемника излучения [2]. Координатор с площадью объектива 35 см2 способен обеспечить дальность действия 3000 м при высокой чувствительности к перемещению цели. На рис. 1 приведены зависимости дальности действия координатора L от величины перемещения цели а в рекомендованных областях спектра для фотоприемников при различных величинах К – контраста между целью и фоном (а) и ΔТ – превышения температуры цели над температурой окружающей среды (б). Экспериментальная проверка возможности автоматического сопровождения объектов БТТ в реальных условиях проводилась на пеленгаторах ДП-349, НП-17 и на координаторе КТГС-7.
Пеленгатор ДП-349 был разработан для исследования возможности автоматического сопровождения танка с неподвижного основания. Исследова ния показали, что надежное сопровождение танков в различных условиях на дистанции 3000 м при выполнении условий помехозащищенности обеспечивается только при работе в участке спектра 0,7-1,1 мкм. При работе в видимой части спектра наблюдались частые срывы сопровождения.
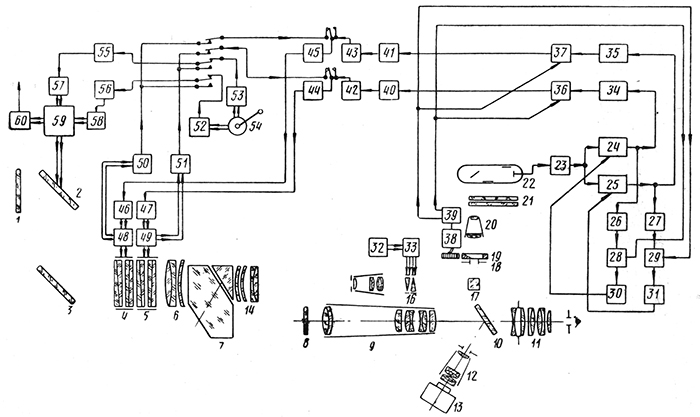
Рис. 2. Блок-схема пеленгатора НП-17: 1-3 – защитное гиростабилизированное и неподвижное зеркала соответственно; 4, 5 – двухклиновые компенсаторы; 6 – объектив; 7 – призма; 8-11 – визир; 8-10,12,13 – канал фоторегистрации; 14-60 – фотоэлектрический канал автоматического сопровождения цели
Блок-схема пеленгатора представлена на рис. 2. НП-17 состоит из трех каналов, их оптическая часть имеет общий вход, который включает в себя защитное зеркало 1, гиростабилизированное зеркало 2, неподвижное зеркало 3 для создания перископичности, два двухклиновых компенсатора 4 и 5, объектив 6 и призму 7. На верхней скошенной грани призмы нанесен интерференционный фильтр, пропускающий в фотоэлектрический канал автоматического сопровождения цели 14-60 ближний ИК-диапазон спектра и отражающий видимую часть спектра в визир 8-11 и канал фоторегистрации 8-10, 12, 13. Для достижения необходимой точности [3] следящая система танкового пеленгатора выполнена в двухконтурном варианте (состоит из грубого и точного контуров). Грубый контур 50, 51, 55-59, 2 выполняет грубую стабилизацию поля зрения и грубую отработку относительной скорости цели. Точный контур 4-7, 14-49 отрабатывает оставшиеся возмущения с помощью двухклиновых компенсаторов и является датчиком изменения относительной скорости перемещения цели для грубого контура. Сигнал рассогласования является функцией не только смещения целей (рабочий сигнал), а также и ряда других параметров, таких как форма и угловые размеры цели, разность лучистостей цели и фона, пропускания атмосферы, чувствительности и нагрузки приемника, усиления усилительного тракта, которые изменяются во времени и нарушают нормальный режим работы пеленгатора. Для исключения влияния этих факторов разработана система автоматической стабилизации крутизны пеленгационной характеристики координатора 16, 26-33, для чего изображению в поле зрения координатора сообщается дополнительное движение под углом 45° к координаторным осям с определенной амплитудой и частотой посредством вращения двух'оптических клиньев 16 в противоположных направлениях. При этом в спектре сигнала появляются частотные составляющие, несущие информацию только об изменении перечисленных параметров. Эти сигналы используются для стабилизации крутизны пеленгационной характеристики координатора [4]. Работают с НП-17 следующим образом. Оператор, разворачивая гиростабилизированное зеркало в двух координатных плоскостях, производит осмотр местности. Сигналы управления на гиростабилизатор подаются с пульта управления 54-56. При обнаружении цели оператор подводит изображение цели к центру перекрестия сетки визира. Одновременно, сравнив размер изображения цели с кольцами сетки (угловые размеры колец соответственно равны угловым размерам поля зрения фотоэлектрического канала, а их центры в пространстве объективов совмещены), включает необходимую диафрагму поля зрения фотоэлектрического канала. При прохождении цели через выбранное поле зрения оператор переводит прибор на автоматическое сопровождение цели. Полевые испытания танкового пеленгатора НП-17 в весенних, летних, осенних и зимних условиях показали, что автоматическое сопровождение цели с движущегося основания надежно и удовлетворяет предъявляемым требованиям. В результате обработки материалов экспериментов получены следующие значения ошибок автоматического сопровождения цели на дистанциях от 500 до 3000 м: - среднее значение ошибок составляет по горизонтали 0,3 м, по вертикали 0,1 м; - среднее квадратическое значение ошибок 0,6 м по горизонтали и 0,2 м по вертикали. Очевидно, что полученные ошибки автоматического сопровождения находятся в пределах требуемой точности. Таким образом, исследования в длинноволновой инфракрасной области спектра с помощью координатора КТГС-7 (разработки ЦКБ «Геофизика» с приемниками НИИ ПФ InSb, Ge:Au и Ge:Zn) показали, что при работе по тепловому контрасту танка дальность действия по лобовой проекции не превышает 1000 м, а по наиболее нагретому левому борту – 2400 м. Работа по лобовой проекции в холодную и сырую погоду невозможна. Разработанная оптико-электронная система пеленгации объектов БТТ в дневное время суток может быть использована как при создании автоматических систем наведения ПТУРС, так и автоматических прицелов танковых пушек.
ЛИТЕРАТУРА
|
|
|||||||||||||||
|
|