|
|
|||||||||||||||||||||||||||||||||
|
|
АНАЛИЗ ЗАРУБЕЖНЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ ИЗ ТАНКА О. А. ДОБИСОВ, Т. М. ЕРОХИНА Вестник бронетанковой техники №1. 1987
В современных системах управления огнем (СУО) танков М-1 (США) и «Леопард-2» (ФРГ) использованы новые технические решения, которые повышают эффективность огня в ночных условиях, точность стрельбы с ходу, эксплуатационные характеристики [1, 2] в широком диапазоне внешних условий. Структурные схемы построены на основе комбинированного оптико-электронного лазерного прицела-дальномера с оптическим и тепловизионным каналами наблюдения и прицеливания, с независимой стабилизацией поля зрения в одной (М-1) или двух плоскостях («Леопард-2»), электрических связей основного прицела с оружием, цифрового (или цифроаналогового) вычислителя углов прицеливания и упреждения, 2-плоскостного стабилизатора танковой пушки. В обоих танках имеются датчики для автоматического учета бокового ветра, крена цапф, параметров движения танка и угловой скорости цели. С помощью устройства встроенной выверки производится ручной ввод поправки на тепловую деформацию ствола, а также компенсация дрейфа поля зрения прицела. Основные особенности структурных схем танков М-1 и «Леопард-2»:
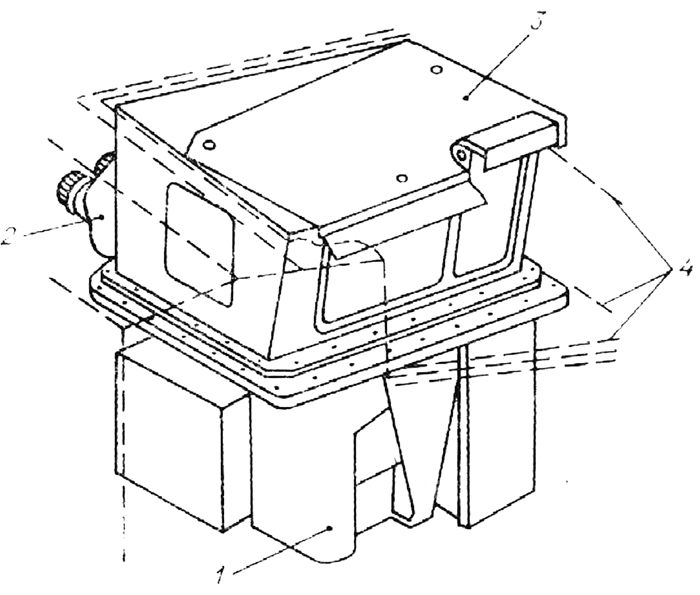
Для наблюдения и стрельбы ночью коминдиры этих танков используют тепловизионные каналы наводчиков; для этого в конструкции прицела предусмотрена оптическая приставка. Командир танка М-1 может пользоваться тепловизионным и оптическим каналами основного прицела, а командир «Леопарда-2»— одним тепловизионным каналом. «Леопард-2» имеет специальную систему согласования линии визирования панорамного прибора командира с центром поля зрения любого призменного прибора: согласование производится автоматически нажатием кнопки. Установка гироскопических датчиков обеспечивает возможность стрельбы с ходу с помощью прицела-дублера в режиме зависимой стабилизации поля зрения. Оба танка имеют конструкцию основного прицела наводчика, в которой оптические и оптико-электронные узлы сконцентрированы в одном месте; это уменьшает несогласованность прицельных каналов между собой и с лазерным дальномером из-за тепловых деформаций башни, точность согласования каналов составляет 15...20". В прицелах использованы термостабильные оптические стекла при минимальном количестве сопряжений оптронных групп. Головное зеркало с системой стабилизации поля зрения устанавливается в башне сверху, а снизу крепится визирный блок с модулями лазерного дальномера и тепловизора (рис. 1).
Рис. 1. Установка основного прицела наводчика на танке «Леопард-2»: 1 – соединительный узел; 2 – узел окуляра; 3 – головная часть прицела; 4 – башня
Такая установка способствует термостабильности оптикомеханических характеристик прицела. Размещение стабилизатора поля зрения близ головного зеркала упрощает связь гиростабилизатора и зеркала. Ленточная передача между ними в вертикальной плоскости становится короче, а в горизонтальной плоскости кинематическая связь гиростабилизатора с зеркалом исключается. Таким образом удается избежать несоосности или неперпендикулярности оптических осей элементов и связанных с этим погрешностей, которые возникают при раздельном (размещении стабилизатора и зеркал. Недостатком конструкции являются большие размеры головной части прицела и его входного окна. Снижается стойкость прицела против осколков и пуль, так как вместе с головкой поражается гиростабилизатор поля зрения. Для защиты дневного и тепловизионного каналов используются броневые заслонки, устанавливаемые вручную изнутри танка. Обе системы характеризуются высоким качеством стабилизации поля зрения и виброустойчивости приборов. Разрешающая способность оптики дневного канала, по результатам испытаний, составляет 25 ... 26 и 40 ... 43" соответственно при движении танка по неровной дороге со скоростью 30 и 40 км/ч. Погрешность стабилизации поля зрения прицелов оценивается величиной 0,15 мрад. Достоверность этой цифры подтверждается измерением погрешности привода стабилизатора поля зрения прицела, средние квадратичные значения которой лежат в пределах 0,025...0,05 мрад. Погрешности измерялись по электрическому сигналу датчика угла рассогласования между зеркалом и гироскопом для скорости танка до 40 км/ч. Погрешность стабилизации поля зрения прицелов оценивается величиной 0,15 мрад. Достоверность этой цифры подтверждается измерением погрешности привода стабилизатора поля зрения прицела, средние квадратичные значения которой лежат в пределах 0,025.. .0,05 мрад. Погрешности измерялись по электрическому сигналу датчика угла рассогласования между зеркалом и гироскопом для скорости танка до 40 км/ч. Таким образом, конструкция прицела обеспечивает высокое качество стабилизацни поля зрения одновременно для оптического канала, лазерного дальномера и тепловизора и создает возможность использования всех элементов СУО как днем, так и ночью. Отсутствие традиционных параллелограммных механизмов для связи основного прицела с орудием объясняется двумя обстоятельствами:
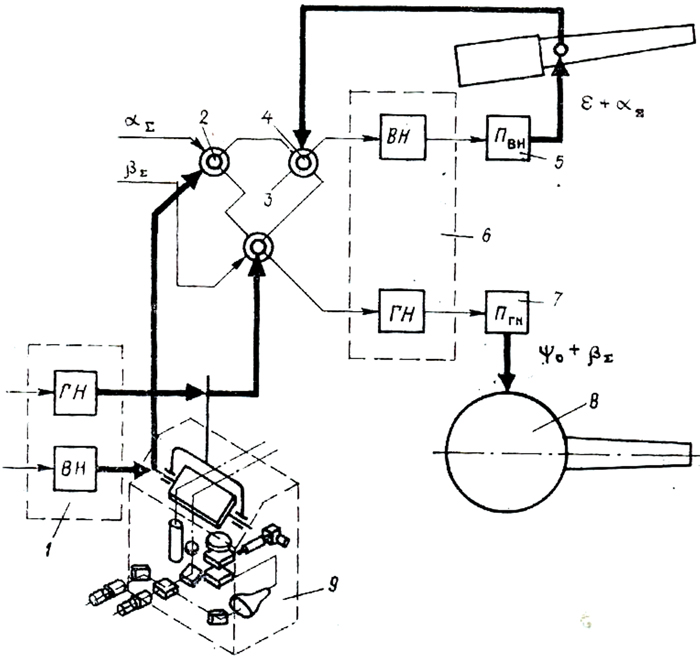
Поэтому в зарубежных танках используются электрические системы, датчики и приемники которых работают в режиме синхронной передачи угла (рис. 2). Такое включение обеспечивает термостабильность связи и среднюю квадратичную погрешность не более 0,1 мрад при всех углах прокачки пушки. Электрическая связь основного прицела с пушкой обуславливает необходимость использования для выверки танкового баллистического вычислителя ТБВ). При этом вводимые корректуры выверки воспроизводятся на дисплее и запоминаются в ТБВ. Для контроля выверки без выхода экипажа из танка и учета теплового изгиба ствола в обоих танках имеется устройство встроенной выверки с коллимационным оптическим датчиком, размещенное на конце ствола. Выверочный крест коллимационного датчика вводится в иоле зрения основного прицела с помощью оптического элемента (танк М-1) или с помощью следящего привода стабилизации поля зрения в горизонтальной плоскости («Леопард-2»), в связи с этим на прицельной сетке западногерманского ганка имеется специальный знак.
Рис. 2. Система связи прицелов с приводами пушки и башни танка «Леопард-2»: 1 – гиростабилиазатор; 2 – датчик (вращающийся трансформатор) системы синхронной связи в плоскости ВН; 3 – датчик системы связи в плоскости ГН; 4 – приемник системы синхронной связи в плоскости ВН; 5, 7 – приводы стабилизатора оружия в плоскостях ВН и ГН; 6 – электронный блок стабилизатора оружия; 8 – башня; 9 – прицел наводчика; α∑… β∑ – углы прицеливания и упреждения; ε, φ – углы вертикального и горизонтального наведения
Инструментально-методическая погрешность выверки прицела оценивается величиной не более 0,1 мрад, которая определяется в основном ошибкой визирования прицельной марки, неточностью оптико-механических элементов, дискретностью механизмов выверки. Для улучшения стабилизации танковой пушки приняты специальные меры по уравновешиванию ее со спаренным пулеметом в плоскости ВН и башни в плоскости ГН. Повышению точности стабилизации в горизонтальной плоскости способствует гиротахометр для измерения переносной скорости корпуса и ввода сигналов в стабилизатор вооружения. К особенностям стабилизатора М-1 относится размещение основного питающего насоса в корпусе с приводом от двигателя танка. Питающий насос связан с гидроприводом пушки через гидравлическое вращающееся устройство. Имеется вспомогательный насос с приводом от аккумуляторной батареи. Он применяется при выходе из строя основного насоса или танкового двигателя. Для уменьшения инструментальных и методических погрешностей (таблица) исходных установок разработан цифровой (цифроаналоговый) вычислитель вместо электромеханических и аналоговых ТБВ, которые устанавливались на танках второго поколения. Инструментальные погрешности современных зарубежных ТБВ при выработке суммарных углов прицеливания и упреждения оцениваются значениями δ≤14÷0,15 мрад. Для уменьшения методических погрешностей в ТБВ используются специальные алгоритмы выработки углов α и β; относительная угловая скорость перемещения цели учитывается как в горизонтальной, так и вертикальной плоскости.
Точностные характеристики* СУО
* Числитель в плоскости ВН, знаменатель – ГН.
Углы прицеливании α на обоих танках и углы бокового упреждения β на танке «Леопард-2» вводятся в стабилизатор оружия с помощью точных электрических систем синхронной связи прицела с пушкой. Углы β вводятся в прицел М-1 с помощью следящей системы привода сетки с высокоточным фотоэлектрическим датчиком и привода азимутального зеркала, а также подаются в стабилизатор оружия, при этом перекрестье остается на цели. Функции вычислителя расширены. Он используется для:
Кроме того, в ТБВ танка «Леопард-2» производится автоматическая выверка и ввод в систему наводки прицела относительной угловой скорости цели за счет движения танка, а также вычисляются поправки к дальности цели Дц на перемещение стреляющего танка от момента измерения Дц до выстрела. В каналах выработки упреждений используются фильтры с параметрами, зависящими от дальности цели. Инструментальные погрешности датчиков бокового ветра составляют 1...2,5 м/с. Ввод относительной скорости цели облегчает работу наводчика, обеспечивает автоматическое удержание линии визирования при движении танка (для неподвижной цели). Погрешности этой системы компенсируются наводчиком при уточнении наводки. Для уменьшения влияния времени от команды до вылета снаряда из канала ствола в ТБВ предусмотрена схема формирования зоны разрешения, запрещающая выстрел при отличии в определенных пределах угловых скоростей линии визирования и оси канала ствола. Ширина зоны разрешения 0,4 мрад, при этом частость нахождения пушки в зоне получена равной 15 %, а время нахождения – 0,3 с с вероятностью Р = 0,9. Дальнейшее развитие СУО за рубежом связывают с внедрением микропроцессоров, автоматизацией управления вооружением, возможностью ведения прицельного огня в плохую погоду в условиях применения активных помех. При модернизации СУО возможно внедрение системы автоматической компенсации дрейфа гироскопов и выверка линий прицеливания основного прицела и пушки. Предполагается установить независимый от прицела наводчика командирский панорамный тепловизионный прицел, а также тепловизионный прибор водителя, лазерный дальномер на СО2 и систему опознавания «свой–чужой». За рубежом ведутся работы по созданию системы автоматического слежения за целью, включающей в себя работающую в диапазоне миллиметровых волн РЛС и тепловизионный прицел. Предполагается, что эта система обеспечит обнаружение целей в любое время суток в условиях естественных и искусственных помех (дождь, туман, дымовые завесы и др.). Анализ конструкции обоих танков показывает, что СУО «Леопарда-2» более развита но сравнению с американским танком М-1 за счет панорамного прибора командира со стабилизацией поля зрения в двух плоскостях, а также 2-плоскостной системы стабилизации поля зрения в основном прицеле наводчика. Заслуживают внимания технические решения по комплексированию оптических и тепловизионных каналов наблюдения и прицеливания в едином приборе, панорамному прибору с 2-плоскостной системой стабилизации поля зрения и системой самоцелеуказания относительно призменных приборов, но системе встроенного контроля СУО и коллимационному устройству встроенной выверки прицела с пушкой, а также по сменному прибору ночного видения на месте командира танка. Вывод. Усовершенствование систем управления огнем современных зарубежных танков направлено на повышение точности и стабильности работы всех узлов, включая оптические приборы, электрические системы связи, устройства встроенной выверки, цифровые (цифроаналоговые) вычислители, датчики входной информации. Некоторые решения могут быть использованы при проектировании приборов СУО отечественных танков.
СПИСОК ЛИТЕРАТУРЫ
Статья поступила в редколлегию 15.09.86. |
|
||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||