|
|
||||||||
|
|
РАДИОЛОКАЦИОННАЯ ЛОВУШКА ДЛЯ ЗАЩИТЫ ТАНКА
ОТ ПРОТИВОТАНКОВЫХ СРЕДСТВ С РАДИОЛОКАЦИОННЫМ НАВЕДЕНИЕМ
Н. С. Акиншин, Р. Г. Ваксман, Р. М. Караванов, В. Р. Русинов. И. Я. Соколов Вестник транспортного машиностроения. 1992. №2.
На основе результатов экспериментальных исследований оценивается эффективность радиолокационных ловушек, устанавливаемых на танках для защиты от противотанковых средств с радиолокационным наведением и прицеливанием. Рассматриваются ошибки радиолокационного сопровождения танка-цели с противорадиолокационной защитой в коротковолновой части миллиметрового диапазона волн.
Созданные в последнее время за рубежом высокоточные системы наведения противотанковых средств дали возможность поражать танк в раз личных метеоусловиях, в любое время года и суток. Среди них распространены радиоэлектронные системы миллиметрового диапазона волн (радиолокационная станция типа GS № 9МК1 «Роберт» радиолокационный прицел типа «Старле», радиолокационная головка самонаведения типа «Хелфайр-3»). В связи с этим возникает задача поиска эффективных путей радиоэлектронной защиты танков от этих средств. Для поражения
цели с первого выстрела требуется высокая точность радиолокационной пеленгации,
т. к. ею практически определяется вероятность попадания в танк.
Противотанковые ракеты третьего поколения будут иметь вероятность попадания не
менее 0,9 с 400-
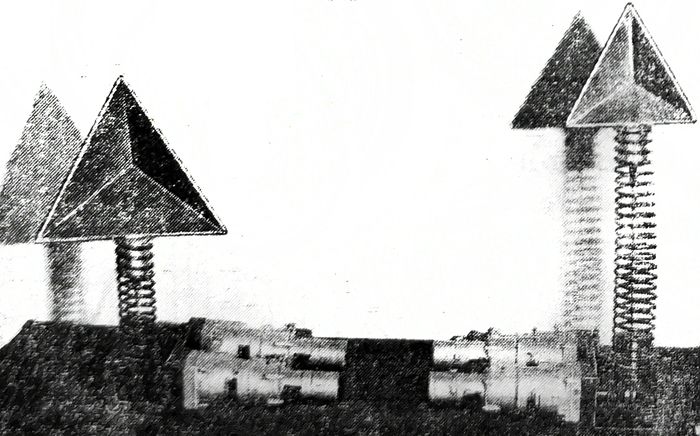
Для искусственного увеличения ошибок сопровождения на эффективных дальностях стрельбы может быть использован известный способ радиоэлектронного подавления противотанкового управляемого оружия, заключающийся в установке на машину радиолокационных ловушек, выполненных в виде уголковых отражателей. Эти ловушки должны размещаться на наружной поверхности машины, быть компактными и работоспособными в любых погодных условиях и в любое время суток. Рассмотрим результаты экспериментальных исследований точности пеленгации основного танка, оборудованного радиолокационной ловушкой, представляющей собой систему из двух трехгранных уголковых отражателей с отношением эффективных поверхностей рассеяния (ЭПР), равным 4 [2]. Отражатели были установлены на цилиндрических пружинах, разнесенных по крайним боковым габаритам танка. Параметры колебательной системы «уголковый отражатель-пружина» выбраны такими, чтобы ее резонансная частота находилась в пределах полосы пропускания следящей системы радиолокатора (рис. 1).
Рис. 1. Устройство противорадиолокационной защиты
В качестве измерительной аппаратуры использовался специально разработанный для этой цели радиолокационный измерительный комплекс, состоящий из аппаратуры пеленгации, работающей в коротковолновой части миллиметрового диапазона волн, электронно-оптической аппаратуры сопровождения цели, аппаратуры регистрации и устройства статистической обработки отраженных сигналов. Эксперимент
проводился по следующей методике. На трех дальностях 1200, 2
000 и
Вначале на каждой из трасс по методике [3] осуществлялись эталонные записи координат танка без средств радиоэлектронной защиты. Затем на него устанавливались уголковые отражатели и записывались обусловленные ими ошибки пеленга. Экспериментальные записи подвергались статистической обработке: вычислялись МО погрешностей пеленга по углу места mΔνε и по азимуту mΔνβ, СКО погрешностей пеленга по указанным углам σ(Δνε) и σ(mΔνβ), вероятность промаха и вероятность срыва системы автоматического сопровождения радиолокационной станции. Для визуальной оценки положения радиолокационного центра отражения (РЦО) относительно ГЦЦ строились годографы – кривые описывающие процесс перемещения РЦО. Результаты статистической обработки наблюдений свидетельствуют о том, что для танка без радиоэлектронной защиты МО ошибки пеленга по азимуту смещено вправо от ГЦЦ, а по углу места вверх. СКО ошибок пеленга, как по углу места, так и по азимуту значительно ниже аналогичных параметров в длинноволновой части миллиметрового диапазона, что позволяет повысить точность сопровождения цели на всех дальностях действия противотанковых средств. При
сопровождении радиолокатором основного танка с радиолокационными ловушками и
ракурсе φ=0° РЦО смещался вверх от ГЦЦ на
расстояние 0,55≤(Δνε)
≤
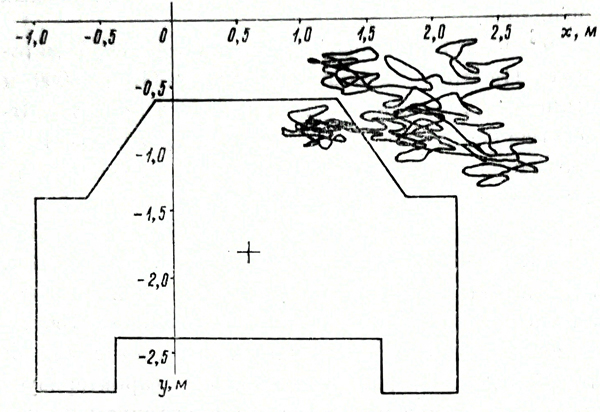
В азимутальной плоскости РЦО смещался вправо (а сторону доминирующего отражателя) от ГЦЦ на расстояние 0,57≤m(Δνβ) ≤2 м при 0,416≤ σ(Δνβ)≤0,715 м (рис. 2),
Рис. 2. Траектория
РЦО на фоне контура танка с уголковыми отражателями, двигавшегося при φ=0°,
на дальности
Рассмотрим в качестве примера результаты аппроксимации экспериментальных гистограмм азимутальной и угломестной ошибок пеленга штатного танка и танка, оборудованного радиолокационной ловушкой (рис. 3). Как видим, установка ловушки приводит к смещению моды соответствующих составляющих ошибок пеленга вправо и вверх и к резкому увеличению СКО ошибок в обеих плоскостях. Внешняя форма танка не оказывает практического влияния на положение РЦО, так что пеленг в основном зависит от взаимного положения уголковых отражателей. Это объясняется тем, что, во-первых, трехгранные отражатели обладают широкой моностатической индикатрисой рассеяния и, во-вторых, ЭПР у отражателей намного выше, чем у танка.
Рис 3. Результаты аппроксимации экспериментальных гистограмм азимутальных (а, б) и угломестных (в, г) ошибок пеленга танка: а, в – вез радиолокационной ловушки, б, г – с радиолокационной ловушкой, w — плотность распределения
На малых
дальностях (около
При движении танка под углом φ=90° и
дальности
С увеличением
дальности наблюдения от 2000 до
Таким образом, при радиолокационном сопровождении танка-цели, оборудованного радиолокационной ловушкой, его РЦО смещается к границе контура по азимуту и по углу места и возрастают СКО ошибок пеленга.
Вывод. Установка на танк радиолокационной ловушки, защищающей его от противотанковых средств с радиолокационным наведением и прицеливанием, вызывает увеличение ошибок пеленга на 40-50 %, снижение вероятности попадания в цель - на 30 % и увеличение вероятности срыва следящей системы радиолокатора до 0,4.
СПИСОК ЛИТЕРАТУРЫ
|
|
|||||||
|
|